|
Eugenio,77
The outside observers often called the 4WD of Crown and Mark families as "auto-connecting" type - it is understandable and excusable. It is more difficult to say why almost the majority of owners of such cars think the same way. And it’s really interesting what monstrous ideas should be in the minds of those who really try to "turn off all-wheel drive" for "fuel economy, improved dynamics and drift ability"... 4WD system with original designation i-Four was first installed in Toyota vehicles in 1992. Since then, it has been used on Mark II and Crown models, and since 2000s - on related Lexus GS and IS models. The scheme was used in the automatic transmission A340H (2nd generation) and A341H, then in more modern A750H, A760H, A761H, combined with UF1AE transfer.
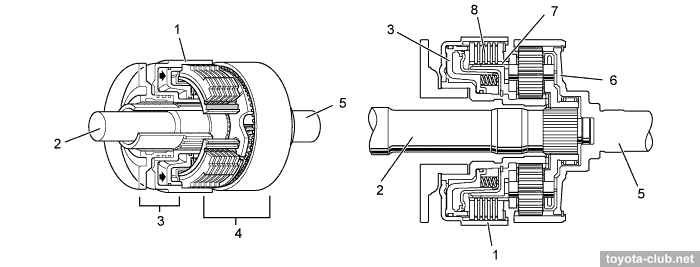
• Drive type - full-time all wheel drive. • Center differential - cylindrical, asymmetrical (torque distribution between front and rear wheels - 30:70).
The exact ratio can be calculated by the number of teeth of the planetary gears::
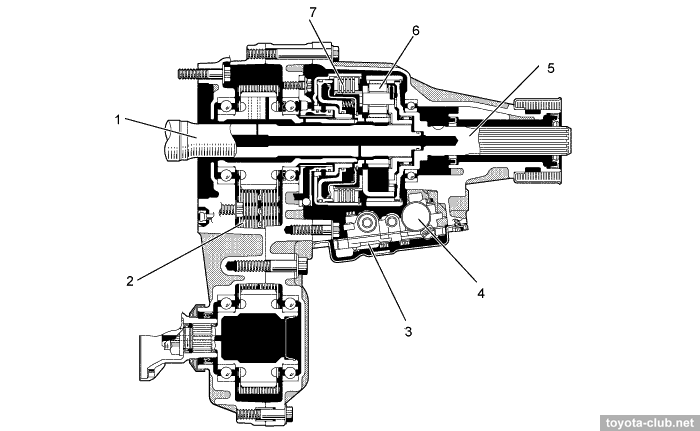
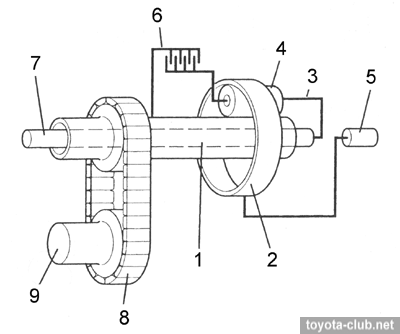
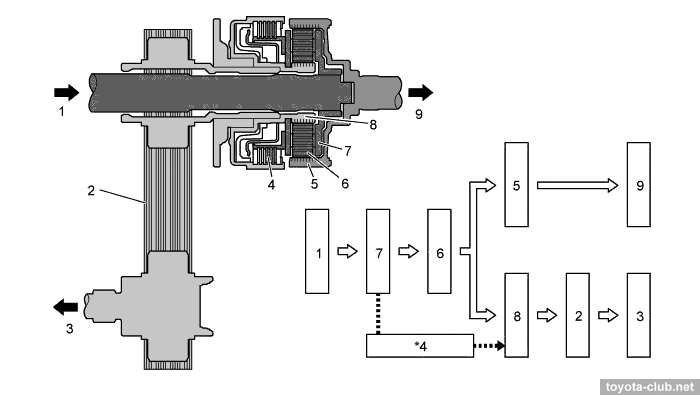
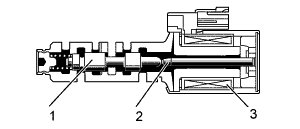
The planet carrier connected to the output shaft of the automatic transmission. The carrier and the sun gear are communicated via the transfer clutch. From the sun gear, the rotation through the chain drive goes to the front propeller shaft, the rotation from the epicycle goes to the rear propeller shaft.
• Center differential locking is carried out by electronically controlled multi-plate hydromechanical clutch. The clutch is located between the planetary differential and the front-wheel drive section, consists of a "wet" discs, plates and a piston. It structurally similar to automatic transmission clutches and utilizes the friction resistance, which is created by the speed difference of pressure and friction discs. The locking force is controlled by changing the pressure acting on the clutch piston. Depending on the locking force, the distribution of torque between the front and rear wheels can range from 30:70 to 50:50.
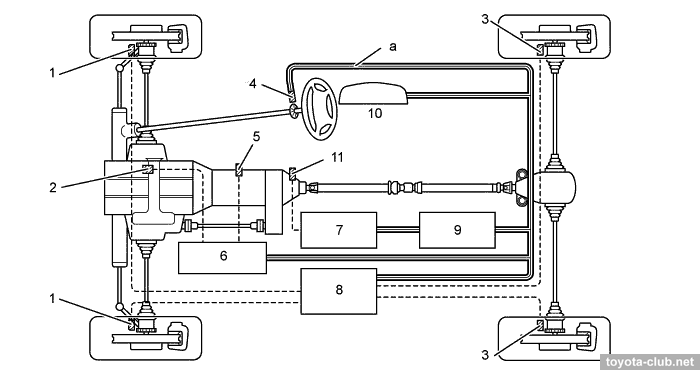
• i-Four is controlled by ABS control unit (on later models a separate 4WD control unit was implemented), based on signals from wheel speed sensors, steering wheel position sensor and throttle position sensor.
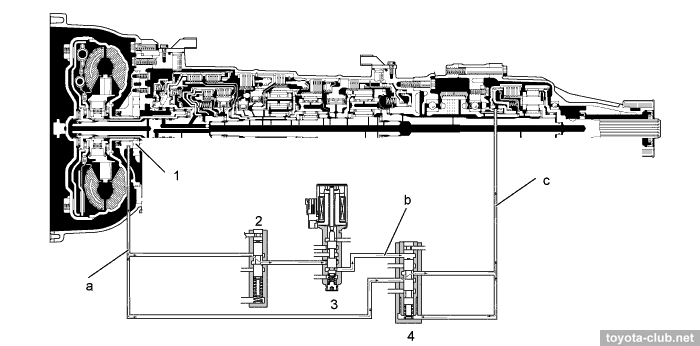
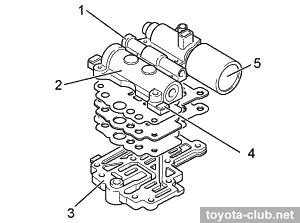
The clutch is controlled using a linear solenoid valve (4WD valve), a modulator valve and a spool valve, which are located in the valve block of the transfer. Linear pressure from the automatic transmission is used by the transfer. Using modulator valve and a 4WD valve, the control pressure on the spool valve is modulated from linear pressure; which, in turn, modulates from linear pressure the operating pressure that directly acts on the piston of the clutch.
The valve block is installed at the bottom of the transfer behind a separate cover.
The 4WD valve armature pulls-out in proportion to the current supplied to the electromagnet and moves the spool. The spool modulates the control pressure corresponding to the force from the armature - that is, proportional to the current value.
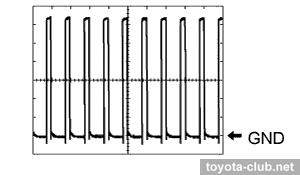
The valve is controlled by PWM principle - a pulse signal from the control unit terminals SLC + / SLC allows to change the current at valve magnet coil within 0-3 amperes.
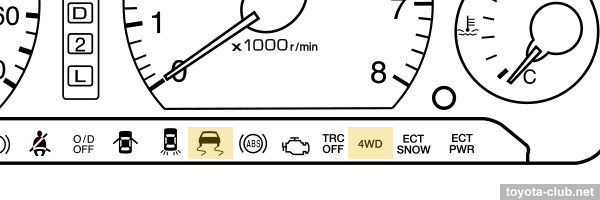
The manufacturer describes several control algorithms: - Start-up. The data from throttle position sensor, brake light switch are used. The differential is locking early, to prevent slipping, improve hill-start or slippery surfaces start-up. - Turning at low speed. The data from steering wheel position sensor is used. The differential locking ratio is minimal to prevent tight corner braking phenomenon. - Slipping at start-up. The data from throttle position sensor, steering wheel sensor and wheel speed sensors are used. If the car starts with the wheels turned, then the previous algorithm requires to decrease differential locking force. However, on slippery surfaces, excessive driving force on the rear wheels can cause side-skidding, and the control unit determines the difference of the front and rear wheels speed and quickly locks the clutch. - Slipping while driving. The data from wheel speed sensors are used. When driving at speeds above medium, the control unit determines the wheel speed difference and calculates the clutch locking ratio that is necessary for stability running. - Acceleration. The data from throttle position sensor and wheel speed sensors are used. When accelerating from medium or high speed, the control unit monitors the wheel speed difference and calculates the clutch locking ratio that is necessary to prevent slipping. No 4WD control by driver is provided. On early models, two combination meter indicators were used: - "Slip" lights up when some wheel is slipping and informs the driver about running on slippery surfaces. On models with VSC, it indicates the activation of the stabilization system. - "4WD" should light up for a few seconds after ignition switch on and go out. Continuously lighting indicates a malfunction of the all-wheel drive system.
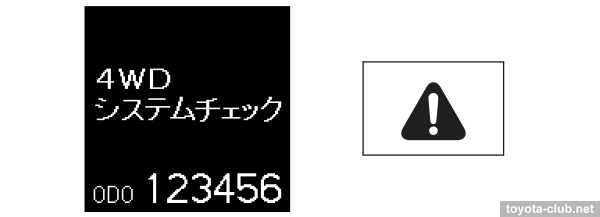
Later the reporting function about 4WD failures was given to the trip-computer.
Fault codes related to i-Four system control::
Toyota all-wheel drive. Review |
|